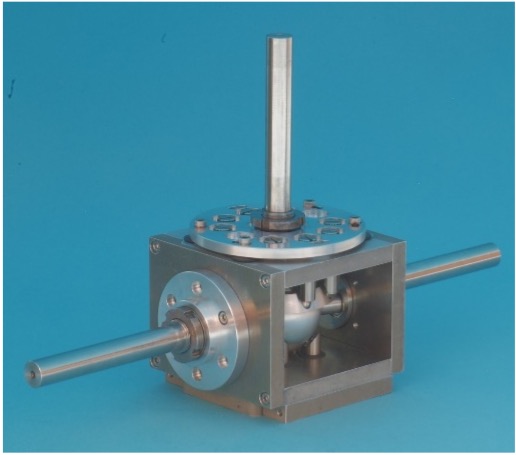
直交出力型歳差運動ボール減速機
アドRoBoは直交出力型歳差運動ボール減速機を開発しました。この減速機はバックラッシがなく高い精度を実現できる他、コンパクトなスペースで大きな減速比が得られるなどの利点があります。
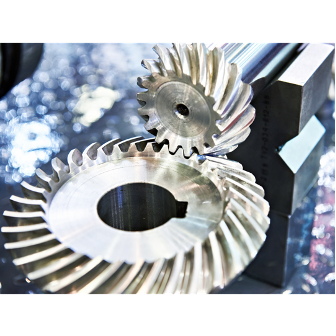
傘歯車機構(従来)の減速機
傘歯車機構の減速機は、傾斜のある傘のような形の歯車を大小組み合わせて減速する機構の減速機です。歯数が異なる2つの歯車を組み合わせて、歯数の違いから生じる回転数比から減速します。一般的に、大歯車と小歯車を直交させて出力を90°方向に伝達させるために用いられます。
傘歯車機構(従来)の問題点
精度の低下
歯車の回転を滑らかにするためには、歯と歯の間に多少の隙間や遊び(バックラッシ)が必要です。また駆動を繰り返すことで回転軸にたわみが生じてきます。これらにより、減速機の回転精度、位置決め精度が低下します。
振動・騒音の発生
傘歯車機構は原理的にバックラッシが発生するため、振動や騒音が発生します。
大きな減速比を得るために大型化
歯車機構の減速比は歯車の歯数比によって決まります。したがって、大きな減速比を得るためには片方の歯車の歯数を増やす必要があり、大型化します。また、同時噛み合い歯数も少なくなり、騒音や振動の発生、歯にかかる負荷の増加などの問題が生じます。
本減速機の原理
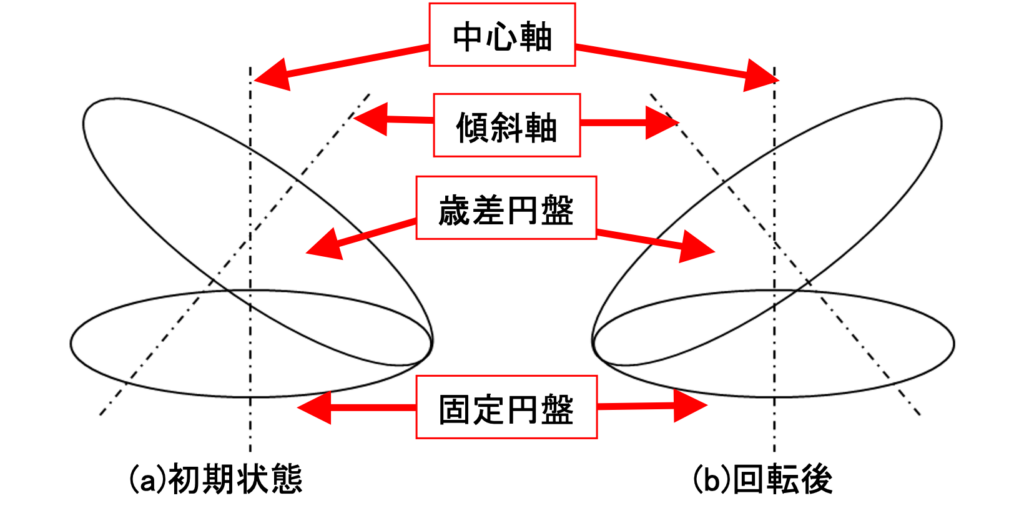

直交出力型歳差運動ボール減速機は2つの円盤の円周差を減速に利用した減速機です。歳差円盤が傾斜軸を中心に固定円盤の円周に沿ってコマのように回転します。この固定円盤と歳差円盤の円周差で減速を行い、転動ボールと転動ボールが回転するように独自に設計された溝により、回転軸を直交方向へ出力することが可能になります。
本減速機の特長
高い位置決め精度・回転精度
本減速機は、円周差を利用して減速しているため、バックラッシをゼロにすることができます。したがって、高い位置決め精度と回転精度を実現できます。
低振動・低騒音
バックラッシをゼロにすることができるため、低振動・低騒音を実現できます。
大きな減速比を生じさせることが可能
本減速機は、構造的に大きな減速比を生じさせることが可能です。
小型化・軽量化
従来の傘歯車機構よりも大きな減速比を得るために必要なスペースが狭いため小型化が可能であり、本減速機の重量は約1400gで軽量化も可能です。
用途
今後拡大が期待されるCOBOTや高い位置決め精度が期待される検査システムロボットなどのロボットハンド手首ユニットとしての利用をターゲットに使用用途の拡大を目指します。